Батиметрические исследования рельефа дна водохранилищ
Принципы работы эхолотов
Для исследования рельефа дна акваторий и подводных объектов применяются разные методы и технические средства для выполнения съемки поверхности дна.
По мере развития экономики и в целом человечества, люди производят все больше отходов, требующих утилизации, переработки или захоронения. Уникальные растворяющие свойства воды сделали водоемы нашей планеты точкой сброса канализационных вод, местом погребения вредных отходов различных производств.
На сегодняшний день к актуальным задачам исследования водоемов можно отнести мониторинг состояния рельефа дна и выявление подводных объектов, которые являются потенциальными источниками возникновения экологических бедствий. К источникам подобной угрозы относятся: вредные отходы промышленного производства, подводные переходы магистральных трубопроводов, плотины, дамбы, транспортные сооружения и т.п. Техногенные катастрофы, как правило, могут произойти из-за разрушения гидротехнических и транспортных сооружений, плотин и дамб, так как на данных водоемах с большой вероятностью происходят серьезные естественные изменения рельефа дна, в частности, заилованность, а также изменения в результате деятельности человека – сброс технических и иных отходов, а также паводковых вод [260].
Одним из методов исследований батиметрии является гидролокаторы бокового обзора (ГБО) представляет собой активную гидроакустическую информационную систему обследования подводного грунта, поиска стационарных объектов, площадного картографирования дна, при этом качество детализации и отображения полученных изображений не уступает качеству фотографии. С помощью ГБО можно обнаружить, идентифицировать и исследовать объекты, расположенные на поверхности дна и в толще донных осадков.
Основными элементами ГБО являются стрежневая (непрерывная) линейная излучающая антенна (или гидроакустический излучатель), который создает первичное гидроакустическое поле в виде звуковых импульсов – пингов, и принимающая антенна (или гидроакустический приёмник), преобразующая отраженные от объекта поиска эхо-сигналы в электрические сигналы. Для упрощения конструкции прибора излучающую антенну и приемную антенну ГБО интегрируют в один блок – приемно-излучающую антенну (трансдьюсер) и устанавливают на корпус забортного устройства. Забортное устройство ГБО необходимо жестко закрепить на забортной штанге или на корпусе плавательного средства. В случае невозможности закрепления можно взять на буксир с помощью троса-кабеля. Для выполнения высококачественной съемки с отличной детализацией объектов на дне забортное устройство ГБО должно двигаться на заданной глубине. В основном это 5-20 м от дна.
Принцип действия ГБО основан на излучении с высокой скоростью звуковых импульсов, в перпендикулярном направлении к движению судна. Приемно-излучающая антенна посылает ряд акустических волн, которые дойдя до поверхности грунта отображают на нем расположенные объекты. Воздействую на грунт и объекты поиска, звуковые импульсы вызывают эхо-сигналы от них, которые в свою очередь возвращаются к приемно-излучающую антенну приемника ГБО и преобразуются в электрические сигналы. Эхо-сигналы от объектов вызывают электросигналы большого напряжения, чем эхо-сигналы от поверхности грунта. Время прохождения эхо-сигнала от антенны до объекта, а также другие параметры для каждого звукового импульса приемник записывает отдельно. Переданная информация обрабатывается в процессорном блоке, далее данные по каждому звуковому импульсу компонуются в строки, создавая реальную картину поверхности дна и объектов под плавательном средством в режиме реального времени [252]. Схема работы ГБО показана на рисунке 1.
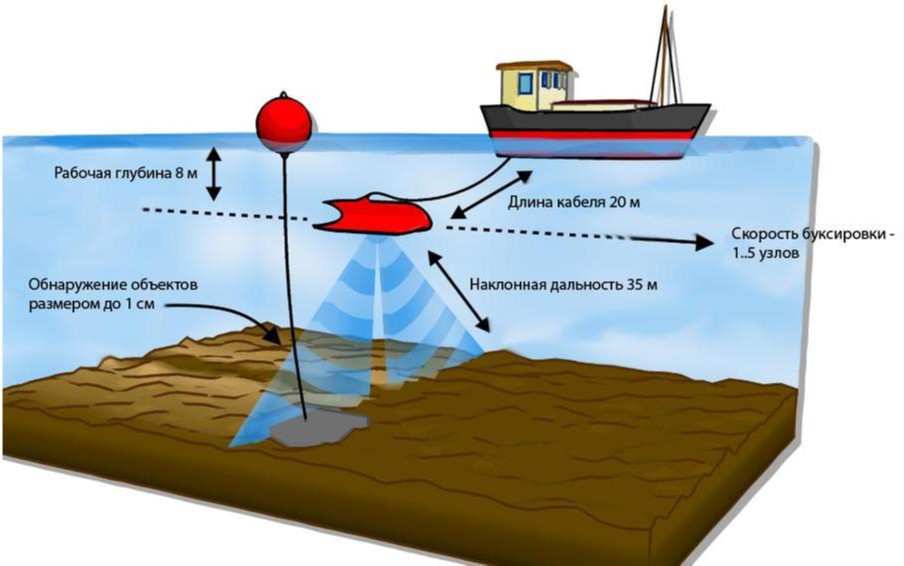
Рисунок 3 - Схема работы ГБО
Применение батиметрических систем ГБО для изучения поверхности дна показывает перспективность этой технологий. Изначально данная технология применялась для обнаружения затонувших объектов. В последующем исследования поверхности дна позволяют получать уникальные научные данные о геоморфологической структуре в ряде районов с интересной геологической направленности: рифовые зоны, подводные цепочки гор и т.п. Стоит упомянуть, что в поисках исторических объектов как «Титаник» и «Бисмарк» нашли свое успешное применения системы ГБО. Были обследованы большие по площади и численности районы дна акваторий, которые представляли значительный археологический интерес. Вышеперечисленные области использования систем ГБО были связаны в основном с большими глубинами – свыше 2000 метров. Это объясняется особенностями распространения в воде акустических волн, в частности их, относительно малым поглощением [261].
Многолучевые эхолоты
В процессе промерных работ применяют многолучевые эхолоты (МЛЭ) единый алгоритм в определение глубины. Производиться определенное освещение полосы обзора акустическим способом, ширина освещаемой полосы прямо пропорциональна глубине. Расчет глубины промеров в пределах освещаемой полосы обзора производится на основе эхо-сигналов направленные по наклонным лучам с известными углами приемов. Время, затрачиваемое каждым лучом при распространении в толще воды, пересчитывается в наклонную дальность, далее с учетом угла луча и данных профиля скорости звука рассчитываются глубина и расстояние от центра антенны каждого пятна акустического контакта луча с поверхностью дна, проще говоря, принцип действия основан на формировании преобразователем веера узконаправленных акустических лучей, расходящихся в поперечной плоскости плавательного средства [262].
В основном многолучевые системы состоят из блока обработки (процессорного блока), который, как правило, синхронизируют с мощным компьютером необходимым для выполнения батиметрической съемки с использованием пакета программных обеспечений, гидроакустического преобразователя и терминала управления. Большая часть МЛЭ имеют модульную конструкцию, которая позволяет уменьшить массу и объем используемого оборудования.
Дополнительные датчики и приборы к МЛЭ являются:
- датчик измерения скорости звука в воде, в режиме реального времени;
- навигационное оборудование или ГНСС приемник, необходимые для определения точных координат плавательного средства и точного времени;
- датчики определения параметров движения судна, такие как гирокомпас, датчик определения поперечного и продольного кренов;
- датчик измерения вертикального распределения скорости звука в воде [263]. На рисунке 4 показан рабочий экран МЛЭ.

Рисунок 4- Рабочий экран МЛЭ
В случае необходимости ГНСС приемник и датчик определения параметров движения судна можно заменить системой позиционирования и ориентации. Данная система позволяет определить координаты, курс плавательного средства, точное время, а также крен-дифферент поперечного и продольного крена.
Информация с данных датчиков, передается в режиме реального времени в процессорный блок и берется в расчет в ходе определении глубин.
В конце прошлого столетия многолучевая батиметрия получила большой толчок в своем развитии и распространении. Это обусловлено с принятием Стандартов Международной Гидрографической организации на гидрографические съемки [256].
В настоящее время МЛЭ динамично входят в различные области морской геодезии и гидрографии, считающиеся высокоточным оборудованием, с помощью которого мы можем определить не только глубину промера, но и эффективно использовать его в обследовании подводных объектов.
Многолучевые системы нашли свое применения в области:
- картографирования акваторий портов, внутренних водных путей и судоходных каналов;
- классификации донных осадков;
- выполнения детальной съемки рельефа дна на акваториях, где осуществляется подводное строительство или дноуглубление;
- инспектирования, обнаружения и картографирования подводных объектов;
- обследования гидротехнических сооружений, подводных трубопроводов в местах их пересечения с относительно неглубокими реками, озерами и водохранилищами;
- глубоководная съемка с целью определения границ континентального шельфа.
Например, в Арктике в период 2010 года были выполнены гидрографические работы по определению границ континентального шельфа. В ходе этих работ научно-экспедиционное судно «Академик Федоров», было оснащено глубоководным многолучевым эхолотом Kongsberg Simrad EM122 [264].
В большинстве случаев МЛЭ имеют малую пространственную разрешающую способность, которая определяется шириной характеристики направленности, но все же широкие величины участков обзора. Кроме того, имеют большую точность определения координат промеров, чем у ГБО [265].
Однолучевые эхолоты
Однолучевые эхолоты (ОЛЭ) являются наиболее широко используемыми эхолокационным прибором на сегодняшний день. Однолучевые системы предназначены для определения глубины промера, отображения профиля и структуры дна акватория. Измерительные приборы данного класса используются для выполнения разного рода навигационных задач, в поиске и классификации различных подводных объектов на дне и в толще воды. На рисунке 5 изображен ОЛЭ семейства ODOM Echotrac.

Рисунок 5 - Однолучевой эхолот
ОЛЭ, как правило, состоит из четырех базовых элементов: передатчик, преобразователь (трансдьюсер), приемник, система управления и отображения информации. Для того, чтобы получить данные промеров на движущемся судне, работа однолучевого эхолота осуществляется в непрерывном цикле, называемом циклом посылок или же цикл-пингов [266].
Принцип работы ОЛЭ состоит в том, что антенна, которая излучает ультразвуковые импульсы, затем обратно принимает эхо-сигналы, которые отразились от поверхности дна или объекта на дне. Расчет глубины и расстояния до обнаруженных объектов, а также расстояния до поверхности дна высчитывается по затраченному времени излучения ультразвукового импульса и его возвращения в виде отраженного эхо-сигнала на приемную антенну эхолота. Аппарат определяет только глубину или расстояния до найденных объектов. Каждому исходящему ультразвуковому импульсу от антенны соответствует один вертикальный столбец на дисплее. Вновь обнаруженные объекты в ходе излучения очередных импульсов, отображаются на экране в масштабированном столбце в виде штрихов. Далее картина на дисплее делает сдвиг на один столбец влево, а на освободившееся его место поступают данные последующих измерений. Вот таким образом мы видим, как на экране прибора формируется гидроакустическое изображение.
В момент движения плавательного судна с установленным на борту прибором, картина поверхности дна соответствует дну под антенной нашего устройства.
Трансдьюсер однолучевой системы имеет диаграмму направленности в виде вертикального конуса с углом обзора от 3° до 30°. Частотный диапазон работы эхолотов лежит в пределах от 12 кГц до 500 кГц, поэтому, чем выше рабочая частота, тем меньше угол обзора.
Антенна однолучевого эхолота за один раз может только излучать и принимать один эхо-сигнал. Но, учитывая их низкую стоимость, простоту конструкции и большой надежности, однолучевые системы на сегодняшний день продолжают активно развиваться и широко применяются в разных отраслях производства.
Несмотря на то, что ОЛЭ признаются не столь функциональными, большая доля из них все же могут похвастаться достаточно высоким уровнем технических характеристик. Параметр глубины сканирования состоит в пределе от 180 до 400 метров. Угол луча у однолучевых эхолотов может обладать недостаточно высоким значением, однако в большинстве случаев данный недостаток отсутствует. Мощность однолучевых и многолучевых эхолотов определяет уровень детализации сканирования, однолучевые эхолоты относительно мощности не уступают многолучевым эхолотам [267].
В таблице 1 приводятся достоинства и недостатки батиметрических систем для гидрографической съемки.
Таблица 1- Батиметрические системы для гидрографической съемки
|
Тип оборудования |
Достоинства |
Недостатки |
|
ГБО |
Качество детализации и представление полученных изображений не уступает качеству фотографии |
При выборе цели поиска используют только геометрические характеристики объектов поиска (размеры и форму). Не могут отличить объекты поиска от других подобных объектов (камни, мусор и т.п.) |
|
МЛЭ |
Высокоточное оборудование при определении глубины, эффективен при обследовании подводных объектов |
Имеют малую пространственную разрешающую способность, которая определяется шириной характеристики направленности |
|
ОЛЭ |
Глубина сканирования от 180 до 600 метров, низкая стоимость, простая конструкция, большая надежность, широкое применение |
Малая функциональность (излучает и принимает за раз один эхо-сигнал) |
Использования однолучевого эхолота при батиметрической съемке является одним из эффективных способов для выполнения мониторинга водоемов. Так как он удобен и прост в обращении относительно других батиметрических систем.
Использования однолучевого эхолота при батиметрической съемке является одним из эффективных способов для выполнения мониторинга водоемов. Так как он удобен и прост в обращении относительно других батиметрических систем.
В основном эхолоты состоят из основных четырех частей:
- передатчика (излучателя);
- экрана (дисплея), на нем отображается текстовые и графические данные;
- преобразователя (трансдьюсера);
- приемника (датчика) поступающих сигналов.
Передатчик создает следующие через определенный период времени высокочастотные импульсы или же сигналы. В настоящее время в эхолотах применяются рабочие частоты в диапазоне 50 и 200 кГц, реже встречаются эхолоты с частотой в 192 кГц. Звуковые сигналы, излучаемые преобразователем, распространяются в воде со скоростью около 1500 м/сек и отражаются от всех встреченных препятствий: поверхности дна, рыбы, водорослей, камней и других затонувших предметов. Достигшие приемника эхо-сигналы создают в нем электрические импульсы, которые затем многократно усиливаются с помощью в преобразователя и отображаются на экране. Принцип работы эхолота показан на рисунке 6.
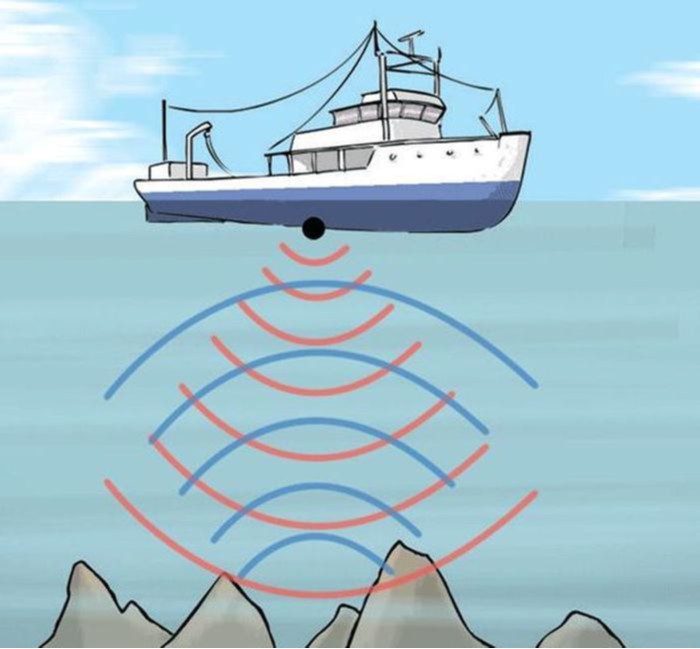
Рисунок 6 - Принцип работы эхолота
Преобразованные данные эхозондирования высвечиваются на дисплее прибора в понятной для пользователя форме восприятия, а именно в числовом значений или в виде графического изображения [268].
Экран показывает полученные данные высокочастотного зондирования и полностью управляет устройством. Для быстрого и эффективного выполнения команд прибор оснащен жидкокристаллическим монохромным или цветным дисплеем и клавиатурой.
Для изображения на дисплее подводного пространства, находящегося под плавательным судном, действуют принципы так называемых разверток.
Быстрая или вертикальная развертка является основной рабочей разверткой. Все поступившие в приемник эхо-сигналы поступают на дисплей в виде черных точек или вертикальных полос, которые отстоят от линии поверхности на определенном расстоянии, расстояние является пропорциональным глубине, где был обнаружен отражающий объект. Быстрая развертка позволяет моментально получить изображение происходящего под плавательным средством на текущий момент.
Медленная или горизонтальная развертка выполняет задачи по отображению на дисплее подводного пространства под плавательным средством в координатах «глубина-время», а также с ее помощью изображение передвигается влево по дисплею. Благодаря этой функций оператор получает картину происходящего под водой во время съемки за прошедший период времени.
В соответствии с указанными принципами действия, если плавательное средство находится в неподвижном состояний, то поверхность дна будет иметь вид горизонтальных полос, а попадающие в зону луча излучателя рыбы в виде отметок, перемещаются на экране в левую сторону вместе с горизонтальной разверткой.
При начале движения судна мы наблюдаем изменения изображения дна, оно соответственно меняется в зависимости от глубины. При этом для наглядности изображения (картинки), скорость развертки должна быть синхронизирована со скоростью движения судна. В настоящее время большинство моделей эхолотов позволяют вручную регулировать скорость развертки и синхронизацию ее с судном.
Необходимо понимать, что полученное таким способом картина, отображенная на экране прибора – это прошлое событие. Например, отметка рыбы, находящаяся на экране, означает, не то, что она в данное время находится под судном в зоне излучателя, а то, что она какое-то время назад была там. Поэтому для того, чтобы видеть, что происходит непосредственно под плавательным средством в момент наблюдения, во многих моделях эхолотов на экране создается дополнительное окно, в котором отображение данных производится без отображения подводного пространства под плавательным средством. Дисплей эхолота с рабочими окнами представлен на рисунке 7.
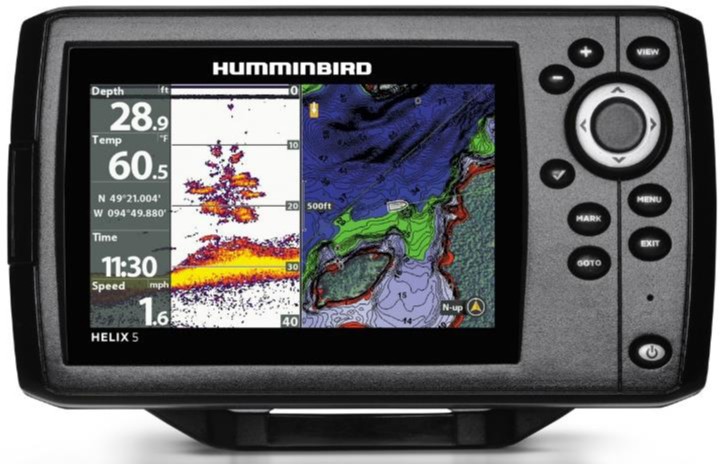
Рисунок 7 - Внешний вид дисплея эхолота
Преобразователь (трансдьюсер) является важнейшим элементом, входящим в состав эхолота, во многом определяющим его основные параметры и характеристики. Данный элемент выполняет такие задачи как трансформация электрической энергии высокочастотных импульсов в ультразвуковые волны, обратное преобразование эхо-импульсов, отраженных от подводных объектов в электрические сигналы [269].
Основным элементом преобразователя является кристалл, который может быть изготовлен из различных материалов, чаще всего для этих целей используется титанат бария. Он имеет цилиндрическую форму и имеет металлизированное покрытие. Данный кристалл помещается в специальный корпус, который изготовляется из металла или высокопрочного пластика и заливается материалом обладающий хорошей звукопроводимостью.
Под воздействием приложенного к рабочим поверхностям кристалла переменного электрического поля в нем возникают упругие колебания, в результате чего кристалл начинает сокращаться и расширяться, вызывая возникновение волн в воде.
Отраженные от дна или каких-либо других подводных объектов волны, воздействуя на кристалл, вызывают появление на его рабочих поверхностях переменного напряжения, поступающего на приемник эхолота.
Принято считать, что преобразователь излучает и принимает звуковую энергию в пределах конуса. На самом деле «конус» – это лишь удобное для пользователей представление характеристики излучения. Реальная диаграмма излучения имеет многолепестковую структуру – главный лепесток, излучающий основную часть энергии, и ряд боковых показаны в виде диаграммы на рисунке 8.
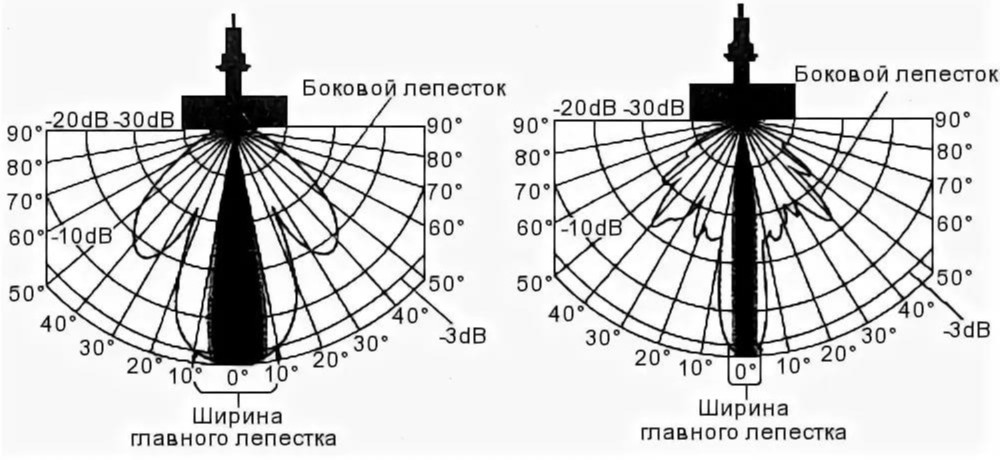
Рисунок 8 - Диаграмма излучения преобразователя
Главной функцией, которую выполняют преобразователи, является получение и передача сигналов о глубине, на которой находятся различные подводные объекты. Существуют новые модели преобразователей, в корпус которых монтируются основные датчики, с их помощью можно получить сведения про температуру воды, скорость течения и скорость движения плавательного судна.
Рабочая частота эхолота является одной из важнейших технических характеристик, от нее зависят такие возможности устройства как глубина, на которой происходит обнаружение подводных объектов, и точность детализации обнаруженных объектов при одинаковом показателе мощности.
Ранее выпускаемые эхолоты в зависимости от конкретной модели и ее параметров, использовали только низкие (50кГц) или высокие (диапазон 192-200 кГц) частоты. На сегодняшний день, во всех современных двухчастотных моделях используется только две частоты – 50 и 200 кГц, а также имеется возможность одновременного или выборочного использования частот обоих диапазонов, при котором задействован только один кристалл [270].
В процессе работы с высокими частотами ширина диаграммы излучения обратно пропорциональна частоте излучения – чем выше частота излучения, тем уже сужается конус. Это в свою очередь позволяет значительно увеличить плотность звуковой энергии, что дает оператору возможность обнаружения на большой глубине даже самых маленьких объектов, и более подробно отобразить на дисплее [270].
При переходе работы на низкие частоты наблюдается расширение конуса и, соответственно, уменьшение плотности звуковой энергии в нем. Отсюда происходит, потеря возможности поиска и обнаружения мелких объектов на большой глубине.
[Источники]
256) Полякова Е.В. Возможности подспутникового ДЗЗ с использованием БПЛА CropCam в условиях Европейского Севера // Вестник ПГУ. Сер. Естественные науки. – Архангельск. - 2010. - № 2. - С. 22-26.
260) Лаврова О.Ю., Митягина М.И., Костяной А.Г. Спутниковые методы выявления и мониторинга зон экологического риска морских акваторий. - М., 2016. - 334 с.
261) Тихомиров О.А. Трансформация структуры аквальных комплексов равнинного водохранилища // Вестник Московского университета. Серия 5. География. - М., МГУ. – 2010. - №1. - С.44-49.
262) Cholewiak, D., DeAngelis, A. I., Palka, D., Corkeron, P. J., & Van Parijs, S. M. Beaked whales demonstrate a marked acoustic response to the use of shipboard echosounders. - Royal Society open science. – 2017. - 4(12). – р. 170940.
263) De Robertis, A., Levine, R., & Wilson, C. D. Can a bottom-moored echo sounder array provide a survey-comparable index of abundance? // Canadian Journal of Fisheries and Aquatic Sciences, 2018. - 75(4). – р. 629-640.
264) Macaulay, G. J., Scoulding, B., Ona, E., & Fässler, S. M. Comparisons of echo-integration performance from two multiplexed echo sounders. // ICES Journal of Marine Science. – 2018. - 75(6). – р. 2276-2285.
265) Турсунов А.А. От Арала до Лобнора (гидроэкология бессточных бассейнов Центральной Азии). - Алматы: ТОО “Верена”. - 2002. – 384 с.
266) Тюменев С.Д. Водные ресурсы и водообеспеченность территории Казахстана. - Алматы: 2006г. - 164 с.
267) Тюменев С.Д. Қазақстан аумағының су ресурстары жəне сумен қамтамасыздандыру. - Алматы, 2006. - 141 с.
268) Stumpf, R.P. Determination of water depth with high-resolution satellite imagery over variable bottom types / R.P. Stumpf, K.Holderied // Liminology and Oceanography. – 2003. – V. 48(1). – P. 547-556.
269) Бурлибаев М.Ж. и др. Гидрометрические измерения и гидрогеологические расчеты для водохозяйственных целей. - Алматы, Изд-во: “Каганат”, 2004. – 362 с.
270) Методические рекомендации по проведению комплексных обследований и оценке загрязнения природной среды в районах, подверженных интенсивному антропогенному воздействию / Под ред. М.Ж. Бурлибаева. – Астана.: Изд-во «Кағанат», 2003. – 79 с.