Cбор и обработка данных с использованием батиметрического комплекса APACHE 3 и ГНСС приемника (ровера) CHCNAV i80
В целях организации проведения исследований по оценке рельефа дна и прилегающей береговой зоны водохранилищ в период декабрь 2023 – август 2024 г была проведена подготовка испытательной базы Университета и обучение, сертификация и подготовка персонала рабочей группы. Были приобретены необходимые основные средства измерений и оснастка по проведению геодезических и геоморфологических исследований рельефа дна водоемов.
В качестве основного средства измерений был закуплен APACHE 3 — беспилотный дрон-эхолот для проведения замеров на внутренних водоёмах и мелководье. APACHE 3 представляет собой компактный автоматический гидрографический комплекс, состоящий из наземной станции управления и судна, оснащаемого одночастотным эхолотом и опционально датчиком параметров воды для батиметрического обследования озёр, рек, хвостохранилищ и прибрежных участков шельфа. Станция управления поддерживает связь с бортом через радиоканал или сотовую связь, таким образом, расстояние между станцией и судном не имеет значения, упрощая гидрографическую съёмку. Встроенный двухантенный ГНСС RTK-приёмник для высокоточного определения местоположения и курса судна, а также инерциальная система, позволяют проводить полностью автоматические измерения даже в условиях слабого сигнала со спутников, например, под мостами. Мощные двигатели позволяют APACHE 3 развить скорость до 8 м/с, благодаря технологии точного следования курсу обеспечивается съёмка по заданным параметрам в автоматическом режиме даже при сильном течении и волнах (рисунок 1).

Рисунок 1 - APACHE 3 — беспилотный дрон в условиях водоема
Точность работы аппарата в режиме RTK в плане: 8.0 мм + 1.00 мм/км, по высоте: 15.0 мм + 1.00 мм/км.
Точность работы в режиме PPK в плане: 8.0 мм + 1.00 мм/км, по высоте: 15.0 мм + 1.00 мм/км.
Дрон оснащено одночастотным эхолотом. Измеряемый диапазон глубин до 200 м. Рабочая частота излучения эхолота, кГц 200. Разрешающая способность эхолота, не более 0.01 м. Ширина диаграммы направленности, градус 6.5 ± 1. СКП измерения глубины не менее, м 0.01 + 0.001 x H (где H – измеряемая глубина в см). Частота измерений в секунду, не менее 30 Гц. Аппарат укомплектован специальным программным обеспечением (AutoP;anner и Hydro Survey), позволяющим проводить измерения, сбор данных и предварительную подготовку данных по результатам измерений.
02.07.2024 г беспилотный водный аппарат СHCNAV APACHE 3 со встроенным эхолотом внесен в реестр Государственной системы обеспечения единства измерений Республики Казахстан (ГСОЕИ РК) в качестве средства измерений согласно СТ РК 2.30-2019 «ГСОЕИ РК. Порядок проведения метрологической аттестации средств измерений» с проведением первичной поверки в качестве средства измерений. Это позволяет использовать его в качестве высокоточного гидрологического средства измерений (рисунок 2).
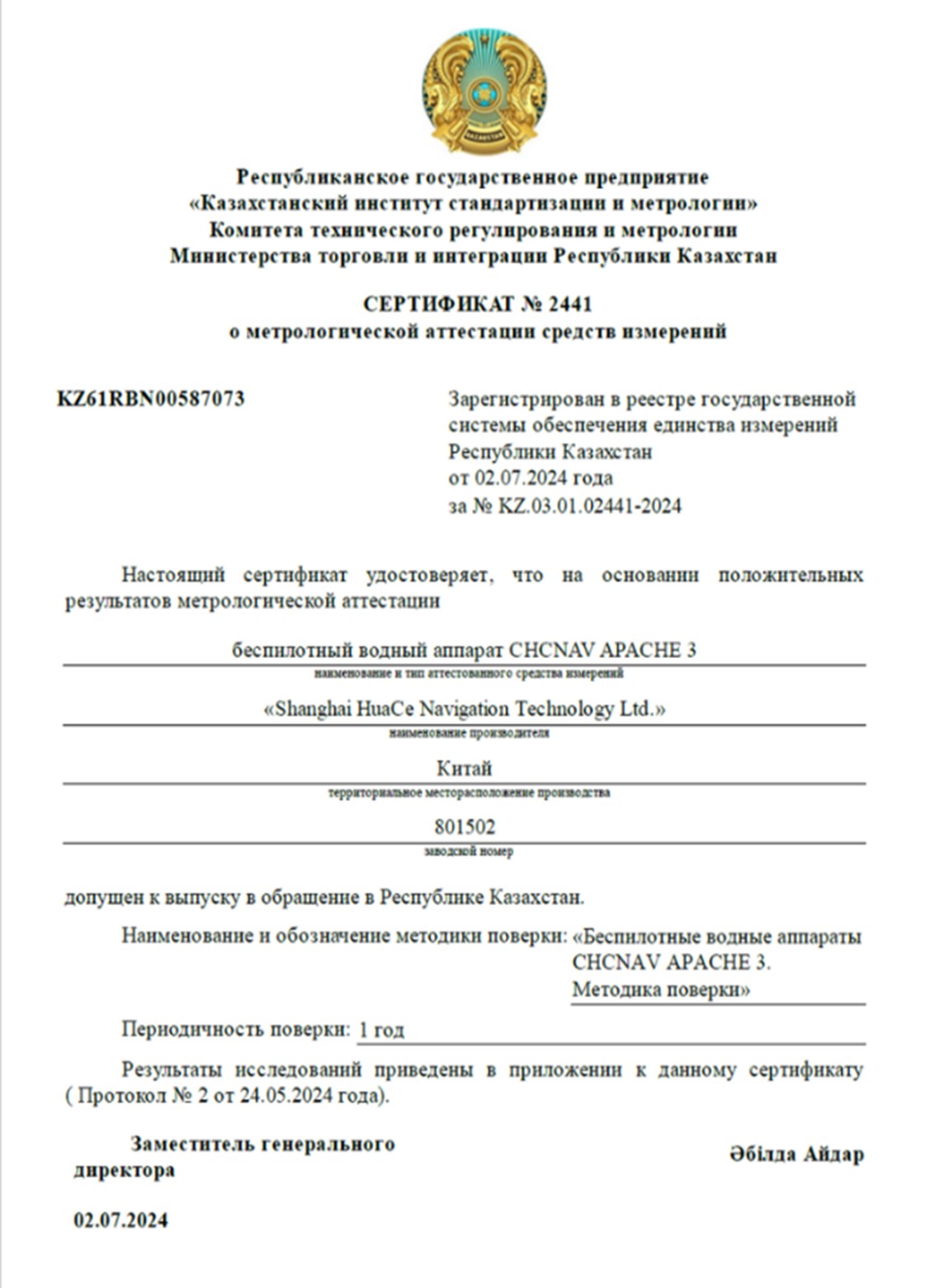
Рисунок 2 – Сертификат о метрологической аттестации батиметра-эхолота
В целях точного позиционирования водного дрона использовался ГНСС приемник (ровер) типа CHCNAV i80. Тип GPS-приемника - Геодезический GNSS/GPS-приемник (https://geostroy.kz/p106633906-gnss-priyomnik-chcnav.html). CHCNAV i80 оснащён современной 1408-канальной ГНСС платой, поддерживающей сигналы ГЛОНАСС, NAVSTAR GPS, Galileo, BeiDou, QZSS и SBAS, а также имеет возможность расширения (с помощью обновления МПО) для новых сигналов. Плата поддерживает уникальную технологию отслеживания и обработки сигналов iStar. Интегрированная спутниковая антенна третьего поколения с высоким коэффициентом усиления повышает эффективность отслеживания сигналов ГНСС до 30%. Приёмник также оснащён высокоточным датчиком IMU, не требующим калибровки, что значительно повышает удобство использования и надёжность решения. Приемник имеет действующий в РК сертификат о поверке (рисунок 3).
Для обеспечения станции ГНСС и позиционирования дополнительно были использованы полевой контроллер CHCNAV HCE600– профессиональный контроллер на базе ОС Android (специально разработан для выполнения геодезических измерений и картографических работ) и портативный GPS-навигатор типа GPSMAP 86i с возможностями спутниковой связи inReach водозащищенного исполнения (рисунок 4).

Рисунок 3 - GNSS/GPS-приемник типа CHCNAV i80. Сертификат о поверке

Рисунок 4 - Полевой контроллер CHCNAV HCE600 и портативный GPS-навигатор типа GPSMAP 86i
По прибытии на место съемок первым этапом является установка антенн и систем ГНСС. Оборудование разворачивается таким образом, чтобы обеспечить надежный прием сигнала и точное позиционирование судна. Особое внимание уделяется выбору расположения антенн, чтобы минимизировать возможные помехи и обеспечить стабильное функционирование на протяжении всего периода съемок. Установка проводится с учетом всех норм безопасности, чтобы избежать повреждений оборудования и обеспечить его стабильно функционирование в течение всего периода съемок. Для установки связи с батиметром используется приемник-передатчик сигнала типа вай-фай роутер. Это позволяет обмениваться данными с программным обеспечением с бортового компьютера и загружать или выгружать в батиметр необходимые данные. Для усиления сигнала ГНСС приемника (ровер) CHCNAV i80 дополнительно использовалась радиоантенна 410-470МГц ГНСС CHCNAV, укомплектованная мачтой телескопического типа (рисунки 5 и 6).

Рисунок 5 - Установка ГНСС приемника (ровера) CHCNAV i80 с радиоантенной на телескопической мачте

Рисунок 6 – Комплекс слежения и позиционирования батиметра-дрона в сборе
Съемка начинается с тщательной настройки маршрутов, что является ключевым этапом для обеспечения точности и эффективности выполнения задач. Используется программное обеспечение AutoPlanner, которое позволяет проектировать маршруты с учетом всех характеристик местности. Это программное обеспечение автоматически оптимизирует маршрут, минимизируя необходимость вмешательства оператора и освобождая его для более важных задач (рисунок 7).

Рисунок 7 – пример построения маршрута в AutoPlanner
Перед началом съемки оператор загружает карты местности в AutoPlanner. Программа предлагает оптимальные маршруты, которые можно дополнительно настроить в зависимости от специфики задания. Это позволяет учесть все особенности рельефа и потенциальные препятствия. После настройки и утверждения маршрута система готова к работе, обеспечивая точное следование маршруту на протяжении всего процесса съемки. Запись данных глубин и навигационной информации начинается автоматически с запуском маршрута. Оператор должен следить за показаниями и минимизировать любую возможность перерыва в записи данных. Использование интерфейса пульта дистанционного управления обеспечивает доступ к ключевой информации в реальном времени, помогая оператору принимать своевременные решения и вносить необходимые корректировки. Информация о глубинах, координатах и других навигационных параметрах сохраняется для последующего анализа и использования.
При проведении работ с батиметром и в целях обеспечения контроля за его работой и предупреждения опасных ситуаций плавающий дрон сопровождался наблюдением с лодки, укомплектованной двигателем (рисунок 8).

Рисунок 8 – Проведение исследований рабочей группой
После завершения съемок начинается важный этап обработки и анализа собранных данных. Этот процесс делится на несколько ключевых стадий, требующих точности и внимательности для обеспечения высокой достоверности результатов. Первым шагом является выгрузка всех собранных данных с оборудования на компьютер для дальнейшей обработки. Данные с борта судна "Apache" передаются через Wi-Fi антенну. Этот процесс включает подключение к защищенной сети судна, выбор необходимых данных и их безопасную передачу на устройство, где после загрузки данные проверяются на целостность. Используются специализированные программы, такие как HydroSurvey, которые позволяют работать с полученными данными наиболее эффективно. В процессе обработки проводится тщательная проверка и корректировка значений глубин, чтобы исключить возможные аномалии или ошибки, возникшие в процессе сбора информации. В HydroSurvey выполняется предварительная обработка данных, включая фильтрацию и сглаживание значений, что способствует удалению случайных шумов и улучшению общей картины (рисунок 9). Программа также позволяет провести коррекцию данных, используя дополнительные источники, например, данные ГНСС для уточнения координат.
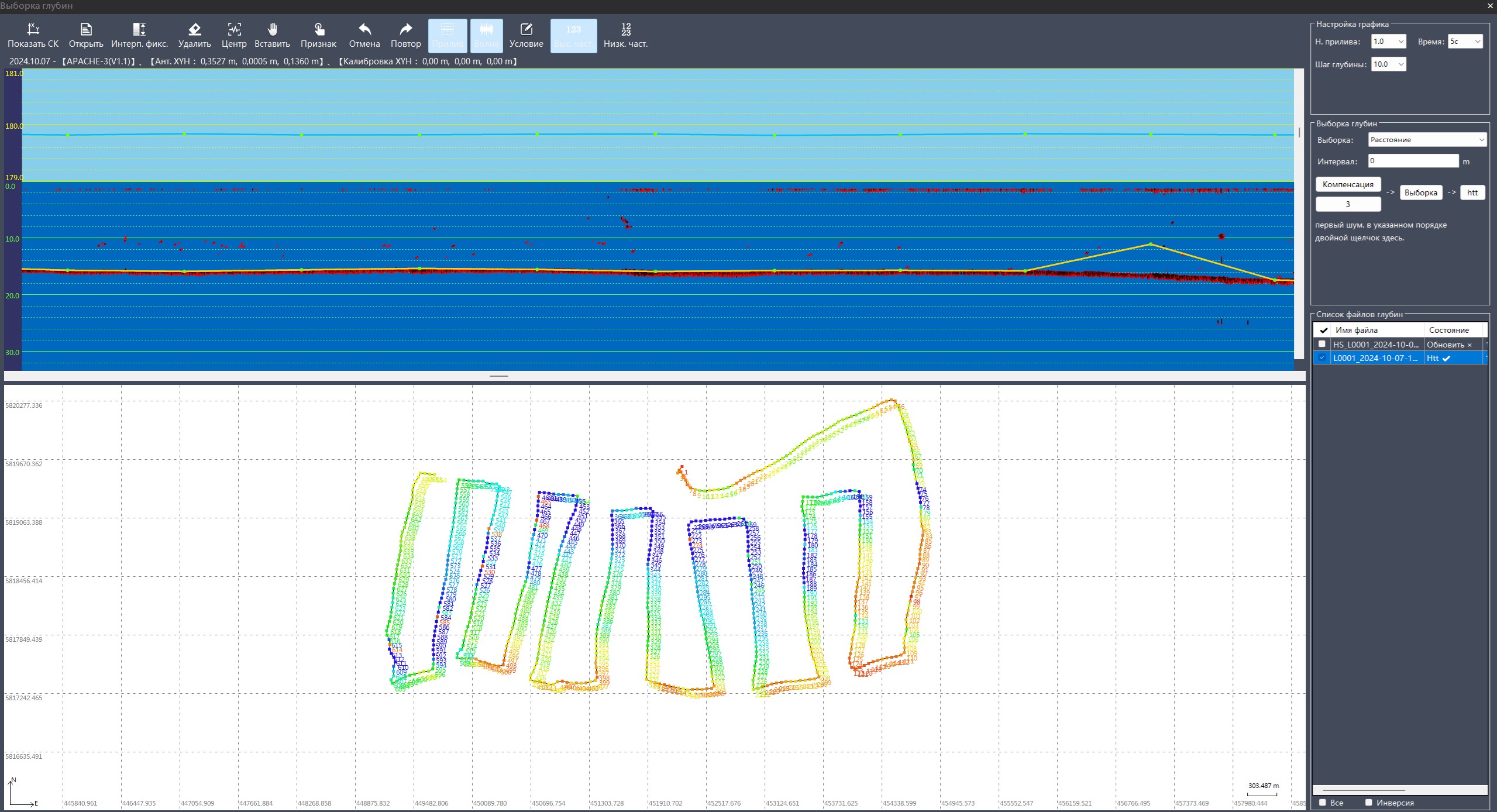
Рисунок 9 – Предварительная обработка данных результатов измерении в HydroSurvey
После полной обработки и корректировки данных в HydroSurvey, они подготавливаются к экспорту и дальнейшей интеграции в другие системы. Данные форматируются в соответствующие форматы, такие как CSV, XML или специализированные ГИС-форматы, чтобы обеспечить их совместимость с внешними платформами. Затем осуществляется экспорт выбранных наборов данных, сохраняющих структурную целостность, что особенно важно для последующего анализа. После этого данные загружаются в целевые системы, включая геоинформационные или аналитические платформы. На этих платформах проводится дополнительный анализ, позволяющий пользователям воспользоваться мощными инструментами визуализации и аналитики для более глубокого понимания информации. Этот процесс экспорта и анализа обеспечивает надежную базу данных для принятия обоснованных решений и использования в различных проектах.
Организация и проведение батиметрических съемок рельефа дна является весьма кропотливым и долгим процессом. На рисунках 10 и 11 приведена разбивка акватории водохранилищ на полигоны, по которым происходит движение батометра-эхолота и сьемка рельефа дна.

Рисунок 10 – Пример разбивки акватории Каратомарского водохранилища на полигоны
Средняя площадь полигона варьируется от 2 до 8 км2. Расстояние между точками съемок берется 50 м. Расстояние между галсами зависит от рельефа береговой линии и акватории водохранилища. Большой фактор влияния на скорость проведения съемок оказывают погодные условия. Сильный ветер, высокие волны, осадки значительно препятствуют проведению исследований, а иногда полностью их блокируют. Идеальными условиями работ является полный штиль, минимальная высота волн, сухая солнечная погода. Площадь акватории каждого водохранилища составляет примерно 90-100 км2. Это достаточно большие площади, требующие трудоемких работ.
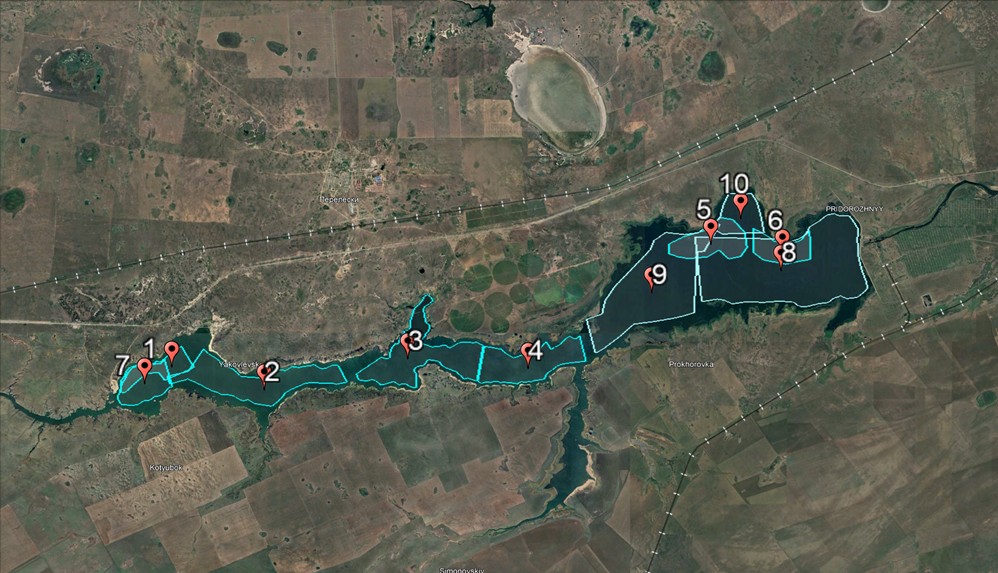
Рисунок 11 – Пример разбивки акватории Верхнетобольского водохранилища на полигоны
При проведении съемок для уточнения отдельных данных используется наложение полигонов, особенно в местах со сложным рельефом береговой линии или в случае слабого приема радиосигнала со станции ГНСС. Вода значительно понижает мощность радиосигнала, что при большой волне или дистанции значительно ослабляет связь дрона с ГНСС станцией. Общий период проведения съемок рельефа дна водохранилищ проводился в период июль – сентябрь 2024 г. с учетом погодных условий, оценки результатов измерений, проведения ремонтных и наладочных работ с дроновым комплексом, обучением персонала, загруженностью на других видах работ. Общее количество времени в рабочих днях составило порядка не менее сорока рабочих дней. Минимальное количество персонала для проведения полевых испытаний составляет не менее четырех человек, включая двух специалистов для отслеживания движения дрона на лодке с двигателем, и двух специалистов, осуществляющих контроль и управление дроном с места базирования ГНСС станции.